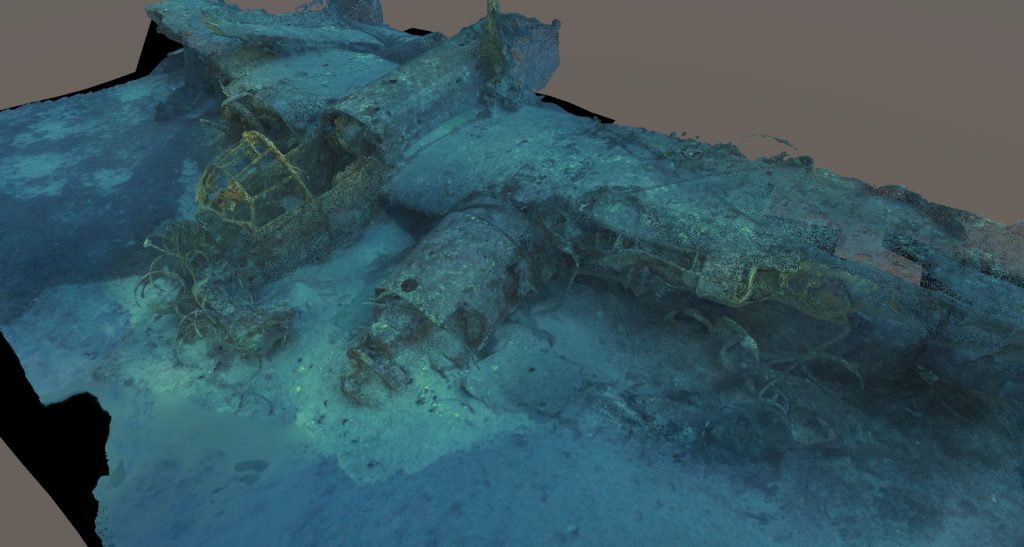
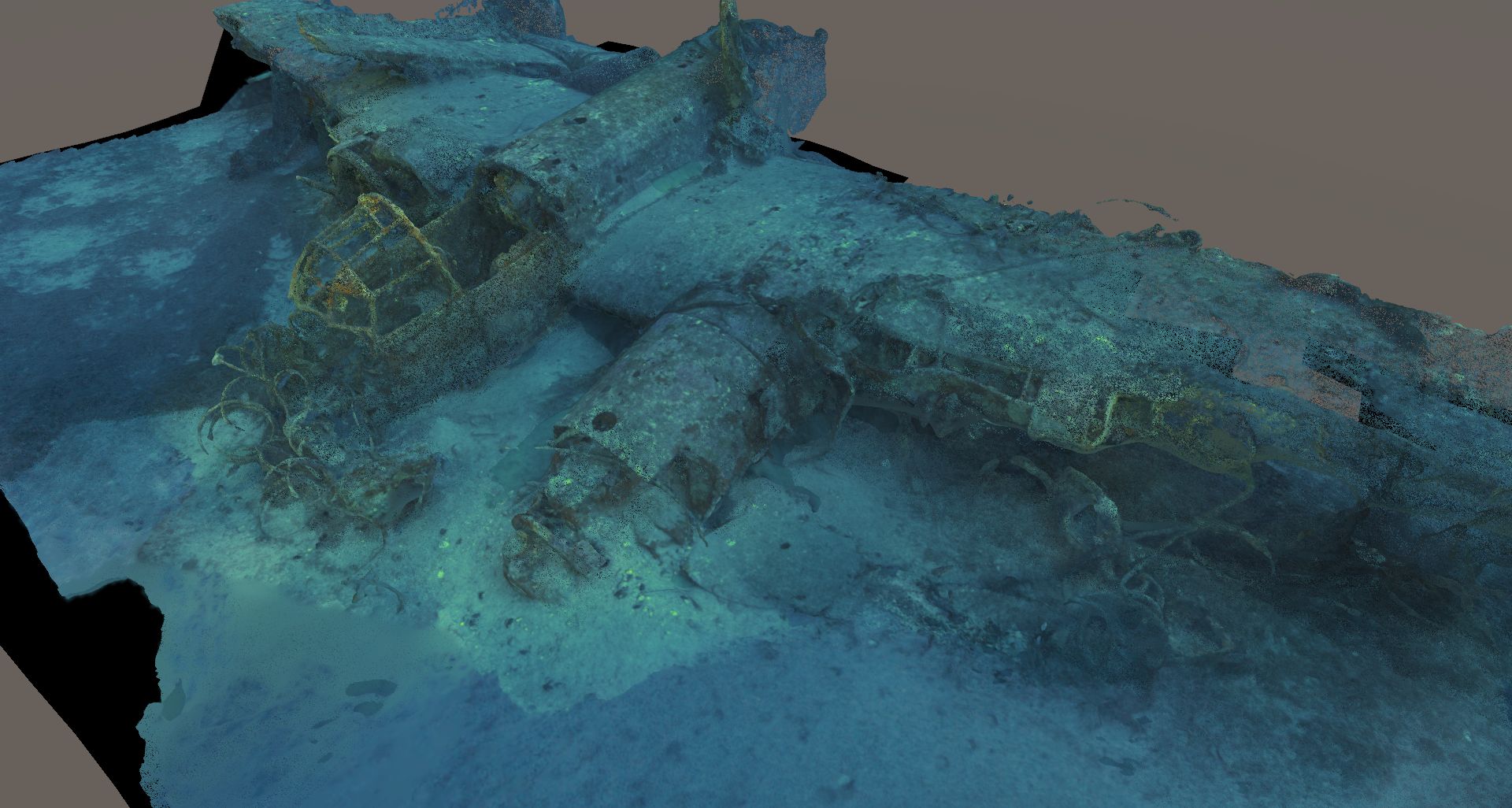
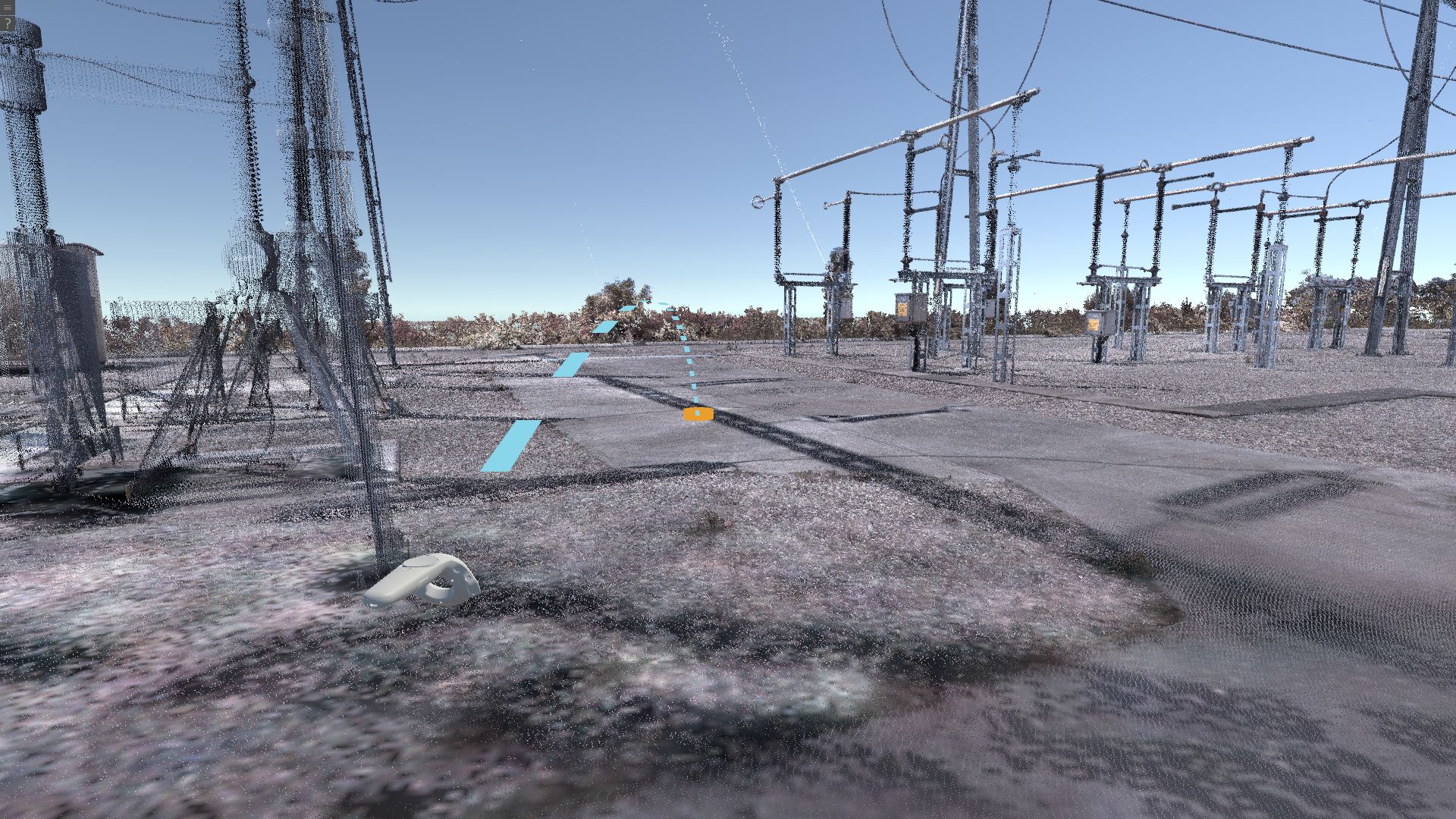
[:fr]La Comex a conçu un ROV qui permet de modéliser les environnements sous marin par photogrammétrie. Nous avons créé une application VR, sur base HTC VIVE, permettant d’interagir dans ces environnements lourds, en garantissant une expérience fluide et naturelle. En dehors du déplacement, commun à tous les usages, les fonctionnalités que nous pouvons apporter à ce type d’expérience sont différentes selon l’utilisateur: ainsi nous avons développé des fonctionnalités plus précises: mesure, prise de notes, affichage de photosphères avec Omexom dans le domaine de l’énergie ou pour le monde de l’archéologie.
 L’usage du scan 3D et de la photogrammétrie se répand dans différents domaines. Mais la donnée brute, le nuage de point, est extrêmement long à retraiter: nettoyage, retopologisation pour transformation en modèles 3D.
Notre approche est différente: elle consiste à récupérer directement ces données brutes, sans traitement manuel pour pouvoir les exploiter directement. Grâces des algorithmes d’optimisation d’affichage et de streaming de données.
La proposition de valeur est la suivante : pouvoir faire l’expérience immersive d’un lieu rapidement, quelques soit la distance, temporelle ou géographique.
L’usage du scan 3D et de la photogrammétrie se répand dans différents domaines. Mais la donnée brute, le nuage de point, est extrêmement long à retraiter: nettoyage, retopologisation pour transformation en modèles 3D.
Notre approche est différente: elle consiste à récupérer directement ces données brutes, sans traitement manuel pour pouvoir les exploiter directement. Grâces des algorithmes d’optimisation d’affichage et de streaming de données.
La proposition de valeur est la suivante : pouvoir faire l’expérience immersive d’un lieu rapidement, quelques soit la distance, temporelle ou géographique.
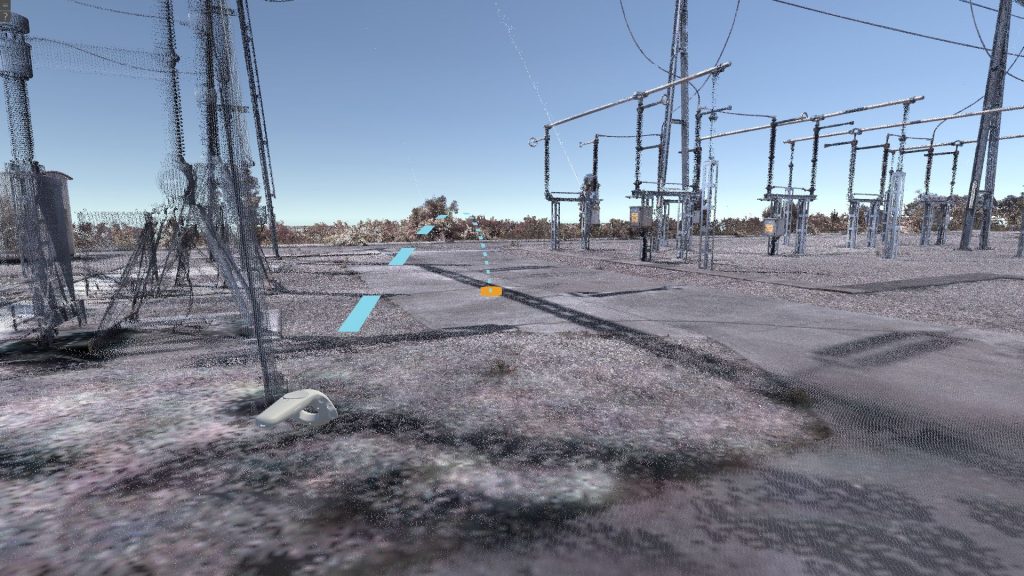 For further detail, please visit this page.[:en]The Comex has designed a ROV that can generate 3D models of subsea environnements, using phtogrammetry algorithms. We have created a VR application – HTC VIVE based – allowing fluid and intuitive interactions into those massive data: huge pointclouds that are normally unusable in real time application. Beyond the spatial navigation, we activate different features depending on the targeted users: measurements, notes, photospheres, CAD models import. Moreover, we had the opportunities to deliver our technology in various domains as energy with Omexom or in the archeology world.
The use of 3Dscan or photogrammetry is more and more frequent, but the pointclouds are requiring fasitidious steps: cleaning, retopolgy before thinking of having acceptable 3D models.
Our approach is a no brainer and different process as it consists in using directly pointclouds without complex and time consuming tasks. We used our own algo to display images with the right framerate – 90 FPS in VR, whatever the pointcloud format and size are.
At the end of the day, the value proposition is getting an instant immersive experience in a specfici location even if far, whithout the need to be a pointcloud specialist.
For further detail, please visit this page.[:en]The Comex has designed a ROV that can generate 3D models of subsea environnements, using phtogrammetry algorithms. We have created a VR application – HTC VIVE based – allowing fluid and intuitive interactions into those massive data: huge pointclouds that are normally unusable in real time application. Beyond the spatial navigation, we activate different features depending on the targeted users: measurements, notes, photospheres, CAD models import. Moreover, we had the opportunities to deliver our technology in various domains as energy with Omexom or in the archeology world.
The use of 3Dscan or photogrammetry is more and more frequent, but the pointclouds are requiring fasitidious steps: cleaning, retopolgy before thinking of having acceptable 3D models.
Our approach is a no brainer and different process as it consists in using directly pointclouds without complex and time consuming tasks. We used our own algo to display images with the right framerate – 90 FPS in VR, whatever the pointcloud format and size are.
At the end of the day, the value proposition is getting an instant immersive experience in a specfici location even if far, whithout the need to be a pointcloud specialist.
 L’usage du scan 3D et de la photogrammétrie se répand dans différents domaines. Mais la donnée brute, le nuage de point, est extrêmement long à retraiter: nettoyage, retopologisation pour transformation en modèles 3D.
Notre approche est différente: elle consiste à récupérer directement ces données brutes, sans traitement manuel pour pouvoir les exploiter directement. Grâces des algorithmes d’optimisation d’affichage et de streaming de données.
La proposition de valeur est la suivante : pouvoir faire l’expérience immersive d’un lieu rapidement, quelques soit la distance, temporelle ou géographique.
L’usage du scan 3D et de la photogrammétrie se répand dans différents domaines. Mais la donnée brute, le nuage de point, est extrêmement long à retraiter: nettoyage, retopologisation pour transformation en modèles 3D.
Notre approche est différente: elle consiste à récupérer directement ces données brutes, sans traitement manuel pour pouvoir les exploiter directement. Grâces des algorithmes d’optimisation d’affichage et de streaming de données.
La proposition de valeur est la suivante : pouvoir faire l’expérience immersive d’un lieu rapidement, quelques soit la distance, temporelle ou géographique.
 For further detail, please visit this page.[:en]The Comex has designed a ROV that can generate 3D models of subsea environnements, using phtogrammetry algorithms. We have created a VR application – HTC VIVE based – allowing fluid and intuitive interactions into those massive data: huge pointclouds that are normally unusable in real time application. Beyond the spatial navigation, we activate different features depending on the targeted users: measurements, notes, photospheres, CAD models import. Moreover, we had the opportunities to deliver our technology in various domains as energy with Omexom or in the archeology world.
The use of 3Dscan or photogrammetry is more and more frequent, but the pointclouds are requiring fasitidious steps: cleaning, retopolgy before thinking of having acceptable 3D models.
Our approach is a no brainer and different process as it consists in using directly pointclouds without complex and time consuming tasks. We used our own algo to display images with the right framerate – 90 FPS in VR, whatever the pointcloud format and size are.
At the end of the day, the value proposition is getting an instant immersive experience in a specfici location even if far, whithout the need to be a pointcloud specialist.
For further detail, please visit this page.[:en]The Comex has designed a ROV that can generate 3D models of subsea environnements, using phtogrammetry algorithms. We have created a VR application – HTC VIVE based – allowing fluid and intuitive interactions into those massive data: huge pointclouds that are normally unusable in real time application. Beyond the spatial navigation, we activate different features depending on the targeted users: measurements, notes, photospheres, CAD models import. Moreover, we had the opportunities to deliver our technology in various domains as energy with Omexom or in the archeology world.
The use of 3Dscan or photogrammetry is more and more frequent, but the pointclouds are requiring fasitidious steps: cleaning, retopolgy before thinking of having acceptable 3D models.
Our approach is a no brainer and different process as it consists in using directly pointclouds without complex and time consuming tasks. We used our own algo to display images with the right framerate – 90 FPS in VR, whatever the pointcloud format and size are.
At the end of the day, the value proposition is getting an instant immersive experience in a specfici location even if far, whithout the need to be a pointcloud specialist.